| RSS | GitHub |
C++11 and Boost both have an error_code class, but they cannot be used interchangeably despite their close resemblance. We introduce a trick of re-catogorizing the error_code from Boost to make it compatible with C++11. This enables us to use std::error_code throughout our entire project, and still integrate with third-party libraries that use boost::system::error_code.
First we have to learn how to define custom error codes.
|
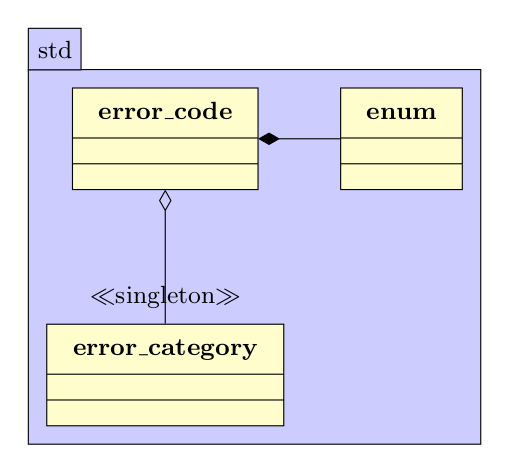
| Figure 1: Anatomy of std::error_code. |
The <system_error> header added in C++11 originates from Boost.System. The following description applies to both the C++11 and the Boost.System variants. The header contains the error_code class used to carry system error codes, and it can be extended with our own custom error codes as well.
When we combine error codes from different sub-systems into a single framework, each error code must be globally unique. error_code achieves this by containing both an error category identifying the sub-system and the sub-system-specific integral value (an enum) identifying the actual error. This way, each sub-system can use their own enum without having to worry about which values the other sub-systems have chosen. The category furthermore provide textual representations of the category and the enumerators.
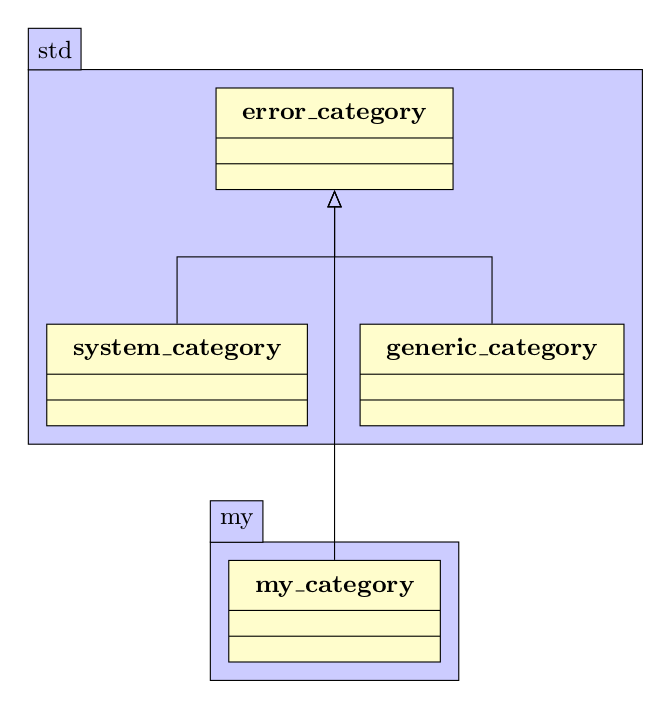 |
| Figure 2: Anatomy of std::error_category. |
C++11 comes with two error categories: std::system_category for platform-dependent error codes, and std::generic_category for C++11-defined system error codes that originates from POSIX error codes. You can think of the latter as the former with a cross-platform enum.
We can pass an error_code variable around like a normal function argument or return value, or throw it via the system_error exception.
This construct is both extensible and reasonably efficient.
Extending std::error_code with custom error codes is done by:
std::error_category.std::error_code framework.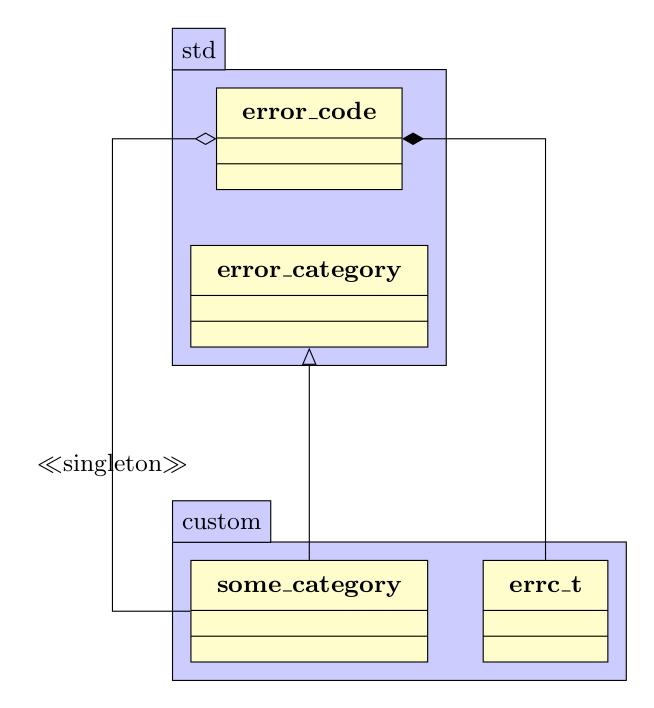 |
| Figure 3: Anatomy of custom error codes. |
We can then generate std::error_codes containing the custom error category and a custom enumerator.
The custom error codes are defined in a normal enum within a custom namespace.
namespace custom
{
enum errc_t
{
forbidden
// Add more error values here
};
} // namespace customThis custom enum must be registered using the std::is_error_code_enum trait.
namespace std
{
template<>
struct is_error_code_enum<custom::errc_t>
: public std::true_type {};
} // namespace stdWe also want to overload std::make_error_code() for convenience.
namespace std
{
inline std::error_code make_error_code(custom::errc_t e)
{
return std::error_code(static_cast<int>(e),
custom::some_category());
}
} // namespace stdThe custom error category must inherit from std::error_category and be obtainable via a singleton.
namespace custom
{
const std::error_category& some_category();
} // namespace customIts implementation must override some virtual functions to provide textual representations of the error category (name) and enumerators (message.)
namespace custom
{
namespace detail
{
class some_category : public std::error_category
{
public:
virtual const char *name() const noexcept override
{
return "custom::category";
}
virtual std::string message(int value) const override
{
switch (errc_t(value))
{
case custom::forbidden:
return "forbidden";
// Add more descriptions here
}
return "unknown custom::category error";
}
};
} // namespace detail
const std::error_category& some_category()
{
static detail::some_category instance;
return instance;
}
} // namespace customEverything has been rosy so far, but we still have to face our original challenge of using both std::error_code and boost::system::error_code in the same application.
Let us say that we use C++11 throughout our application, but we also rely on some Boost libraries such as Boost.Asio that defines their own error codes based on Boost.System. If we want to propagate these errors, whether by value or via exceptions, we will quickly discover that we cannot pass a boost::system::error_code to a function that expects a std::error_code.
When we try to come up with workarounds, we will eventually run into the constraint that the two inherit from different error_category base classes. That is the root cause, but also the seed for a solution.
The trick to overcome the before-mentioned problem is to transform boost::system::error_codes into std::error_codes by re-categorizing the error codes.
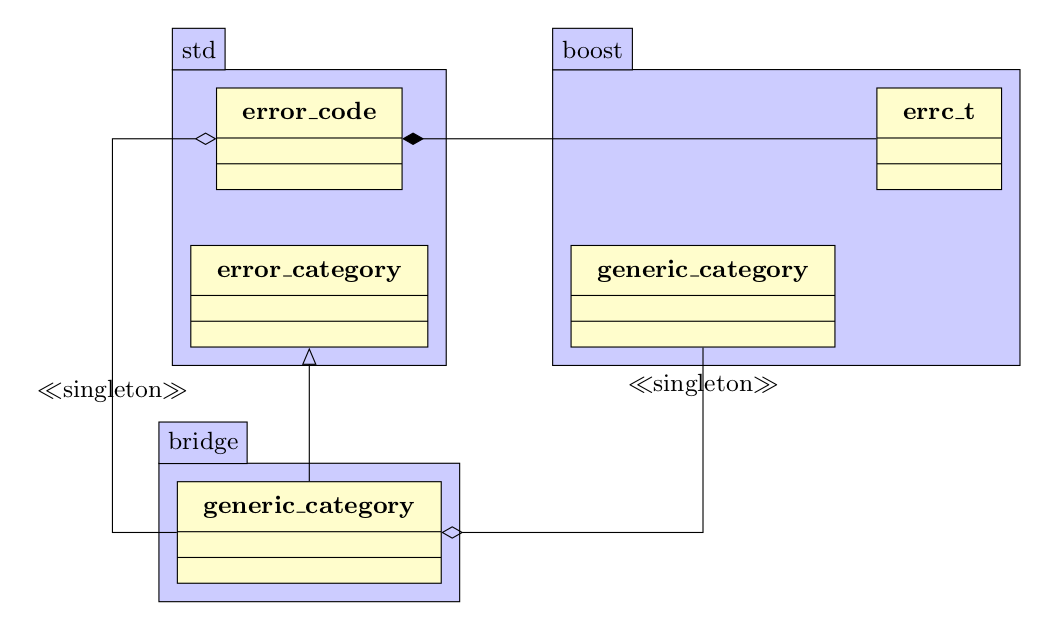 |
| Figure 4: Example of the boost-to-std bridge. |
This is done by defining a bridge error category that acts as a placeholder for a boost error category within the std::error_code framework. This bridge error category inherits from std::error_category, so we make it look like a std::error_category but act like a boost::system::error_category.
We do not need to redefine the enum as we reuse that from Boost.System verbatim. Converting the boost error code into C++11 is then done by creating a std::error_code with the Boost.System enum and our bridge error category.
We start by defining our bridge error category. While Boost.System contains several error categories, we are only interested in generic_category for now.
namespace bridge
{
const std::error_category& generic_category();
} // namespace bridgeThe following step is a bit controversial because we register the Boost.System error values in the std::error_code framework.1 While this is legal code, it is not good style to do this on behalf of Boost.System… but here we go.
namespace std
{
template<>
struct is_error_code_enum<boost::system::errc::errc_t>
: public std::true_type
{
};
} // namespace stdAnd equally controversial, we also overload std::make_error_code() with the Boost.System error codes.
namespace std
{
inline std::error_code make_error_code(boost::system::errc::errc_t e)
{
return std::error_code(static_cast<int>(e),
bridge::generic_category());
}
} // namespace stdWith the above we are (almost) able to create a std::error_code with Boost.System error values.
We still need to implement the bridge::generic_category singleton with overloaded functions that returns the names of the error category and the error values. Rather than providing the textual representations of all error values ourselves we leverage the fact that boost::system::generic_category already is able to do this.2
namespace bridge
{
namespace detail
{
class generic_category : public std::error_category
{
public:
virtual const char *name() const noexcept override
{
return boost::system::generic_category().name();
}
virtual std::string message(int value) const override
{
return boost::system::generic_category().message(value);
}
};
} // namespace detail
const std::error_category& generic_category()
{
static detail::generic_category instance;
return instance;
}
} // namespace bridgeThe above procedure can also be applied to Boost.Asio error codes.
All that is left now is to do the actual conversion.
namespace bridge
{
inline std::error_code convert(const boost::system::error_code& error)
{
if (error.category() == boost::system::generic_category())
{
return std::error_code(error.value(),
bridge::generic_category());
}
assert(false);
return {}; // We could define a bridge conversion error instead
}
} // namespace bridgeDisclaimer: I ought to have used error_condition instead of error_code for custom error codes in the above, but as the distinction between platform-dependent and platform-independent error codes can be expressed via error categories, I just do not see the point of error_condition.